 理工学部への改組について
理工学部への改組について
(2017年4月3日更新)
平成29年4月1日付で,大分大学理工学部が誕生しました。
これに伴い,工学部福祉環境工学科メカトロニクスコースは学生募集を停止し、今後、
理工学部創生工学科福祉メカトロニクスコースとして教育研究を行います。
2年生以上が在籍する工学部福祉環境工学科メカトロニクスコースに関する情報は本ページをご参照下さい。工学部の情報は引き続き工学部のページにて公開中です。
3月28日に、創生工学科福祉メカトロニクスコースのホームページを公開しました。
工学部福祉環境工学科メカトロニクスコースの近況はfacebookページにて更新中です。
English page click here.
福祉環境工学科 メカトロニクスコースのホームページへようこそ!
建築コースのホームページはこちらです.
福祉環境工学科メカトロニクスコース
高齢者や障害者などの社会的弱者はもちろん,すべての人が平等に,より安全で快適な社会生活を送るためにメカトロニクス・システム工学を応用した技術開発・技術者の育成を行います.
お知らせ
- 卒業証書・学位記が卒業生修了生に授与されました。写真等はこちら(2020年3月10日)
- 令和元年度卒業式・学位授与式は中止となりました。福祉メカトロニクスコースでは各研究室で、卒業証書・学位記をお渡しします。学部の対応はこちら。(2020年3月10日)
- 福祉環境工学科メカトロニクスコースのfacebookページを公開しました。(2017年3月28日)
- 創生工学科福祉メカトロニクスコースのホームページを公開しました。(2017年3月28日)
教育と研究
福祉環境工学科は,すべての人が幸福を感じられる高度福祉社会の実現を,工学的な側面から達成するための研究・開発と人材養成を行うことを理念としています.本コースでは,メカトロニクス技術の研究・開発と人材養成をおこなうものです.
授業科目の構成は,学生が学科理念に示す福祉の心を持った技術者としての知力・学力が育成されるよう計画されています.メカトロニクスコースの学生は,機械・電気と,統合技術としての制御情報システムを学び,メカトロニクス技術者として機械・電気を中心とした産業界で活躍できる人材として巣立ちます.さらに専門性を高めたい学生には大学院進学の道が開かれています.
本研究室では上肢リハビリ訓練装置,腰部負担軽減具,下肢自動ストレッチ装置,ロボットハンド,人工関節など,福祉医療に関する機器の研究開発を行っています.上肢リハビリ訓練装置は,楽しみながらリハビリができるように工夫しています.腰部負担軽減具は,簡単な構造でありながら腰の負担を大幅に軽減する装具で,椎間板にかかる圧縮力は半減します.
前田・岡内研究室(身体運動工学研究室):
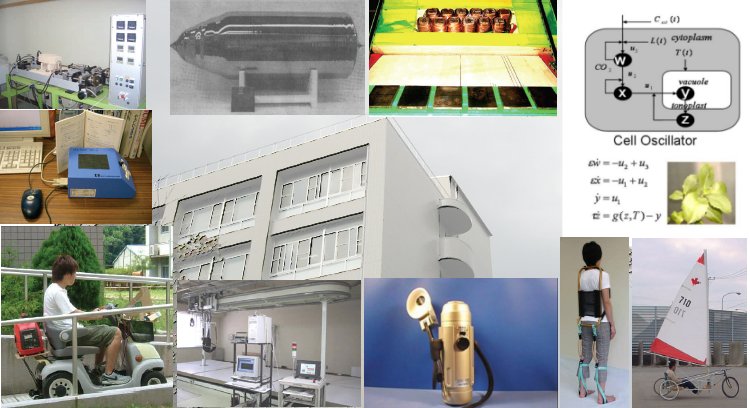
本研究室では,身体運動学やバイオメカニクス,スポーツ工学という観点から,人間が運動するときに身体機能をいかに巧みに使っているかとか,その運動によって人間にどのような負担がかかっているかを研究しています.その他,松葉杖や車椅子などの身障者が使用する機器をより快適に,かつ安全に使えるように改良,開発しています.昨年は障害者のためのスポーツ用具の開発の一つとして,写真のような陸上ヨットを作製して,身障者が安全に楽しめる方法を研究しました.
ある種のリニアモータをTransverse Flux 構造にすると推進力と同程度の大きさの横方向力を発生します.この構造を採用すると床面にリアクションプレートを埋め込むことで横方向力を案内力として利用できます.案内用車輪を必要とせず簡単な構造になり更にバッテリーを搭載すると人になじみやすい搬送装置を実現できます.
本研究室では,制御工学(ロバスト制御,適応制御)の理論的研究とそのメカトロニクス,情報通信工学,システム生物学,画像処理工学,および電力系統への適用を行っています.最近は,物体運動の認識・予測をリアルタイムに行うオリジナルの適応アルゴリズムをベースに,カオス暗号通信系および植物の光合成における内部状態の推定・予測ならびに希望状態への制御を実現する研究などを行っています.
われわれがやり取りをしているさまざまな情報には,多くの画像情報が含まれていますが,その中のいくつかは情報処理技術を用いて全盲の人ともその内容を共有することができます.図形情報や風景画像などの視覚情報の共有に関する研究を中心に,「情報のバリアフリー」を目指しています.
上見研究室:
ヒトが使いやすい装置を設計するには,まず,そのヒトがどのような特性を持っているか調べる必要があります.ヒトの機能を大きく分けると運動機能と感覚機能に分かれますが,本研究室では特に聴覚や視覚,触覚などの感覚機能に着目し,その特性を明らかにします.そして,その結果を障害を持った方の支援技術に応用することを考えています.特に,声を出せないヒトのための発声補助装置や聴覚機能の補助など,人と人とのコミュニケーション支援装置へ役立てていくことを目指しています.
本研究室では,歩行解析に基づくリハビリテーション機器への応用や開発について研究しています.最近,歩行ロボットが注目されていますが,今後のロボットの発展のためには,さらに日常的な歩行動作の解析が必要です.また,歩行の研究は身体リハビリテーションなどへの応用が期待できます.本研究室では,そのような解析・機器開発について研究を行っています.
本研究室では,材料の選定,デバイスの開発,応用機器の開発,実験と評価に至るまで,一連の開発研究と人間理解のための基礎研究を実施します.特に,これまで機能性流体(電気粘性(ER)流体,磁気粘性(MR)流体)を応用したデバイス開発を独自に進めてきました.これらの材料の応用技術に関してもノウハウを保有しています.
クイックリンク
福祉環境工学棟や関連実験室の様子です.
福祉環境工学科について入学志願者が持つと思われる疑問や質問をまとめています.
福祉環境工学科に関する質問や意見などをお寄せください.
福祉環境工学科の教職員一覧のリストです.
学内・学外へのリンク一覧です.
このホームページの制作指針に関してまとめています.